


Analysis and processing of USBL location data in Marine seismic prospecting
0 Introduction
At present, with the Marine seismic exploration business continues to enter deep water area, USBL application is gradually widespread. USBL (Ultra short baseline) is a kind of underwater positioning technology, its working principle is to install transponder on the underwater target to be located, the hull on the water is installed ultra short baseline array, the transponder sends out an acoustic signal, the ultra short baseline system receives the signal to calculate the target's position and distance. At present, it is mainly used in node (or geophone) layout in Marine seismic exploration. Under NOAR (nodeonarope) operation mode, USBL is used for real-time monitoring of node (or geophone) position in the sinking process, and LBL (long baseline) is still used to locate the final node position results. ROV (underwater vehicle) operation mode is gradually entering the development of Marine seismic exploration business. The navigation and positioning system is usually composed of GPS, USBL,INS, compass (bow and inclination sensor), depth meter, altimeter and other sensors, which can realize accurate positioning, autonomous navigation, node layout and other work underwater. The final result of the node position (hereinafter referred to as point position) uses the USBL positioning result.
1 USBL location data analysis
In the NOAR mode, the transponder is attached to the node for deployment. When released, the node falls into the water and has a continuous sinking process until it reaches the sea floor. In the sinking process, due to the influence of ocean currents, the sinking speed and direction of nodes are uncertain. Therefore, real-time acoustic positioning of USBL is needed to obtain the real-time position of nodes in water during the whole process. According to the deviation between the real-time position of nodes and the design point, the navigator guides the ship to adjust the course and speed, and finally makes the landing position near the design point. Meet the design limit. As shown in Figure 1, it can be seen that nodes 1-4 have sunk to the seabed and are in a relatively stable state, at which time the collected USBL data can be used for later data processing; while nodes 5-8 are still in the sinking process, so the collected USBL data can only be used to monitor the sinking position of nodes.
The USBL real-time positioning will record the corresponding data file at the same time. We analyze the data body, extract each field in the data, and match it with the designed node pile number, classify the data body according to the pile number and prepare for processing. The valuable field data recorded includes header information and observed value outcome information. Head section information includes: sound velocity, probe draft depth, pile number and transponder matching relationship, theoretical coordinates, etc. : observation results information includes: transponder number, observation distance, water depth, time, measured coordinates, etc.
Visualization and intuitive analysis were carried out through the extracted USBL data. Firstly, the water depth value calculated by the USBL was analyzed with that of the depth sounder installed on the ship (as shown in Figure 2). When the node is submerged, it continues to sink. During the sinking process, the distance between the node and the ship continues to sail is gradually farther away. When the depth of the node recorded by the USBL is consistent with that recorded by the sounder after the ship's voyage of 120m, it indicates that the node has sunk to the bottom and is in a stable state. When the ship sailed to 195m, the USBL water depth data showed a slight jump, and when the ship sailed to 260m under the influence of observation conditions, there was no USBL location data. From this set of data, it can be seen that when the distance became longer, the Angle of fire (human Angle of fire =ATAN (distance/water depth)) increased, and the USBL water depth data showed a jump, leading to a decline in positioning accuracy. The influence of human firing Angle on USBL positioning accuracy was determined.
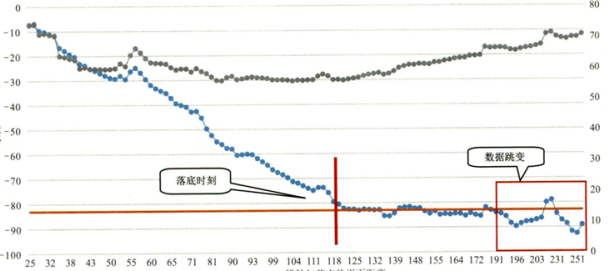
FIG. 2 Comparison between USBL depth value and depth sounder
Since the USBL positioning data started to be recorded when the node entered the water, and the data we need is the USBL positioning data collected after the node sank to the bottom and stabilized, so how to determine the bottling time is the focus of our analysis.
After the above factors are identified, the data are analyzed in detail. Before data collection, USBL equipment should be calibrated and sound line corrected to ensure data accuracy. The USBL positioning data collected in the field was calculated, and the results were compared with the LBL positioning results [2]. The data were divided into multiple sections according to the 5° human Angle of fire. See Table 1 for the comparative data. At 71° ~ 75° human firing Angle, there are 12 baseline numbers after the constraint of point 3 in the statistical table, but the collected acoustic data can not calculate the coordinate value due to serious jump. Due to the influence of external factors, point No. 2 in the statistical table of incident Angle of 76° ~ 80° could not calculate the coordinate value when the shooting Angle was greater than 75°. As shown in Figure 3, as the human Angle of fire increases, the contrast difference also increases correspondingly. When the human Angle of fire is restricted within 70°, the positioning error is less than 2m, and the data accuracy is relatively reliable. As can be seen from Figure 4, the number of baselines increases with the increase of human Angle of fire. When the human Angle of fire is less than 70°, the number of effective baselines is about 8, which can meet the requirements of USBL data processing.
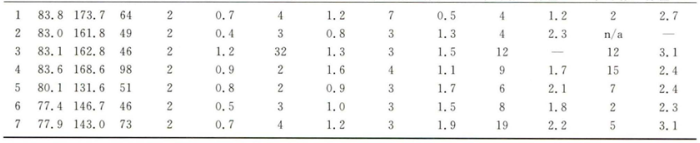
Table 1. Segmental statistics of incident angles
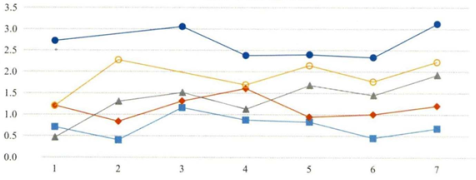
FIG. 3 Coordinate difference between USBL and LBL
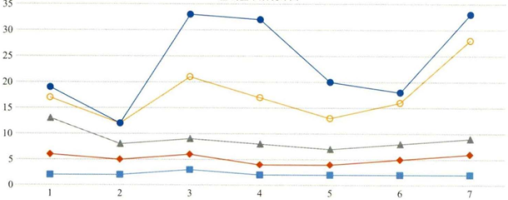
Figure 4 Number of baseline values after constraints
(1) Data optimization through depth and distance values improves the stability of data
(2) The data used in the processing process shall be the data after the node is stabilized;
(3) The human Angle of fire affects the positioning accuracy. When the human Angle of fire is greater than 70°, the error is greater than 2m.
(4) The human firing Angle affects the number of effective baselines. The smaller the human firing Angle is, the less the number of baselines is.
2. Processing the USBL location data
In order to obtain the final results of USBL positioning data, we determined several aspects through research, which are: data filtering, bottom distance constraint, human firing Angle constraint, water depth constraint and adjustment calculation.
2.1 Data Filtering
Data with large residual error will be removed through multinomial filtering. Curve fitting will be carried out for water depth and distance respectively. If the actual value of water depth and distance minus the curve fitting value is greater than the set multiple times the standard deviation, data will be removed; otherwise, it will be retained. The elimination effect is shown in Figure 5a and 5b. After filtering, the data will be eliminated if the residual is greater than the set value.
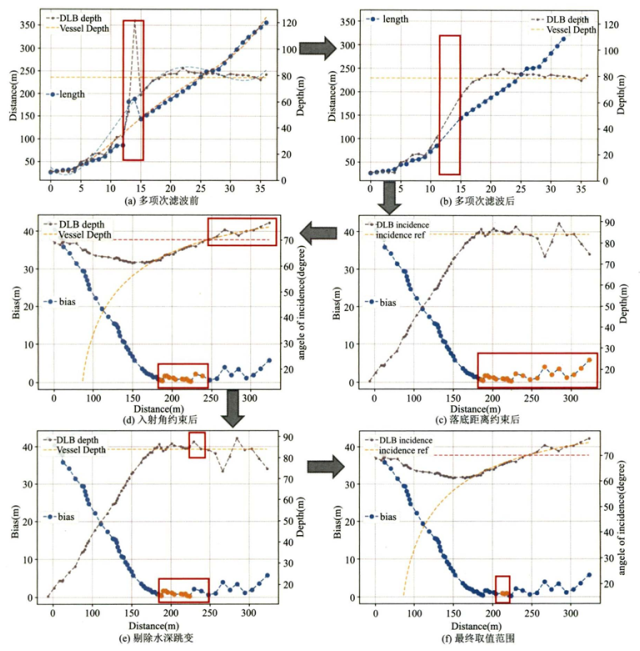
Figure 5 Schematic diagram of the processing process
2.2 Constraint on bottom distance
After filtering the data, in its condition constraints, the first constraint is the bottom of the distance (probe to the transponder). The subsequent USBL location data is considered to be the data after the node bottom stabilizes, as shown in Figure 5c.
If you want to get the distance at the bottom point, you can calculate it according to formula (1), where v and h can be extracted from the data file, while t is unknown, so it needs to be obtained. In Marine seismic exploration, the direction of survey lines in each work area is the same, and the construction delay survey lines travel back and forth in the direction, and the same survey line will be released during the ebb and flow tide as much as possible. According to this characteristic, the relationship between course and tidal current can be determined into four cases, namely: forward current in the direction of extended survey line, top current in the direction of extended survey line, forward current in the direction of reverse survey line and top current in the direction of reverse survey line. The landing distance S in four directions can be summarized according to the data. USBL acoustic data of four situations were collected respectively. t was obtained through the known S and calculated backwards according to the following formula. The t value was substituted into formula (1) for calculation according to the above four power flow situations.

2.3 Constraints on incidence Angle
After the above steps of processing, we have reduced the range of effective data, and now we have obtained the starting point of effective data. Through the previous analysis, it is determined that the increase of human Angle of fire will lead to the decline of positioning accuracy, so the next step is to constrain the human Angle of fire, so that the range of effective data will be further reduced. As shown in FIG. 5d, the human shot Angle is restricted to 70°, and the latter half of the data has been eliminated.
2.4 Water depth constraint
Through the above constraints, a general range of values is obtained, but some abrupt values are thrown into these values. Only by removing these values can the data accuracy within the range be guaranteed. Eliminate the data of water depth jump, and judge that the depth is qualified within the reference water depth of n% (flexibly adjust the value of n), otherwise eliminate. As shown in Figure 5e,
3 Verify the USBL data
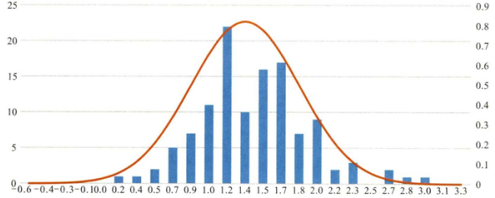
This processing method is used to select a detection line, calculate the position coordinates of each node through the USBL positioning data, and compare with the LBL positioning results to verify the accuracy of the processing results. A total of 117 point coordinates were calculated in the process of comparison test, including 9 points with a coordinate difference greater than 2m and 108 points with a coordinate difference less than or equal to 2m. See Fig.6 for the contrast curve of errors. As can be seen from the normal distribution diagram in Figure 7, the peak value of the normal curve is concentrated between 1.2 and 1.7m, and the highest proportion is concentrated in the frequency range of 1.2m. Through the above data, it is shown that 92.3% of the calculated USBL results and LBL results have a comparison error less than or equal to 2m. The results show that the results calculated by using this USBL data processing method are consistent with the LBL location results, and the calculated results are reliable.
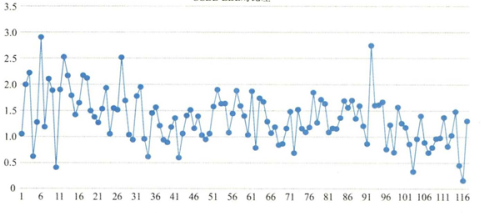
FIG. 7 Contrast difference normal distribution of USBL and LBL
4 Closing Remarks
The positioning accuracy of the USBL has been verified by data when the USBL positioning device is used to arrange nodes. When certain conditions are met, the error is less than or equal to 2m. The following conditions should be met: (1) Carry out calibration according to specifications to reduce the impact of systematic errors [1]; (2) have enough effective data body support, because part of the data with large residual error will be eliminated during filtering and condition constraints; (3) use the data after node bottom and stability to participate in the calculation, so as to avoid interference of calculation results due to node floating; (4) The human Angle of fire is less than or equal to 70°, and it can be seen from the above data analysis that the accuracy will decrease with the increase of the human Angle of fire, and the error is greater than 2m when the Angle of fire is greater than 70°. The influence of different water depths on the USBL positioning results and how to better apply the USBL positioning results are the directions we need to study in the next step.