


The application of ultrasonic sensor in automatic leveling control system of pavers is explored
Preface:
In order to find the level reference point by moving, it is necessary to give full play to the non-contact balance beam function of ultrasonic wave, and effectively overcome the shortcomings of traditional contact leveling reference. Through the use of digital controller for ultrasonic sensor and controller to provide digital transmission signals, to ensure that the signal transmission has a strong anti-interference ability, signal transmission is more rapid, convenient and reliability, improve the overall performance of the system, is widely used in the leveling machine and asphalt pavers.
I. Overview of relevant principles
1. Principle of leveling control system. The leveling control system is composed of ultrasonic sensor, digital controller, control circuit and electromagnetic reversing valve. Each paver is equipped with two control systems, which are installed on both sides of the paver. It is mainly the use of single chip microcomputer to control the digital controller, need to fix the ultrasonic sensor on each side of the balance beam made of straight beam, balance beam is mainly made of aluminum alloy, mainly the bracket installed on one side of the paver position, to achieve the purpose of leveling the big arm. The ironed slab is usually placed directly on the road surface and will also move with the change of the road surface. This type of connection is usually called a floating ironed slab. At the same time, the paver will move along with the ironing plate when driven by the leveling cylinder.
2, ultrasonic sensor ranging principle. Non-contact leveling system is widely used in ultrasonic ranging sensors after rain, in the actual use of the process, increase the reasonable use of pulse echo mode, but also by sending the probe in the form of operation of the transmission medium for ultrasonic pulse wave transmission, sound wave after transmission, will return to the receiving probe through the transmission medium, The time test of ultrasonic pulse is mainly to calculate the time to be experienced from the emission to the reception. The distance meter formula between the probe and the target is: L =0.5ct. Where L represents the distance between the probe and the target, and c represents the propagation speed of the ultrasonic wave in the medium.
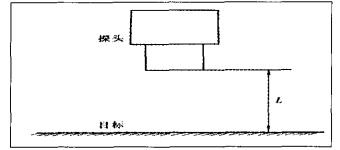
Figure 1. Distance measurement principle of ultrasonic wave sensor
Two, ranging system hardware and software design
1. Hardware design of ranging system. First of all, reasonable choice of single chip microcomputer. In the circuit microcontroller ranging control, need to choose the microcontroller, the microcontroller itself has high performance and low power consumption characteristics, internal contains 8kFlash read-only program memory, random access data memory, programmable timing counter. Secondly, do a good job of ultrasonic transmitting and receiving circuit design. It is necessary to make full use of the P1.0 of the single chip microcomputer to control the ultrasonic wave, and use the transistor to drive, through the output high level, can stimulate the ultrasonic sensor, to achieve the purpose of transmitting ultrasonic wave. In normal times, the ultrasonic sensor mainly outputs low level, so it needs to ensure that the output pulse voltage signal is kept at IOV. Due to the serious incompatibility between this signal and the level of the single chip microcomputer, the pulse signal needs to be converted to pulse signal through the level. Finally, it is necessary to design the circuit of the watchdog interface. Need to make full use of the watchdog circuit to improve the reliability of the work, prevent the single chip program into the dead cycle, to ensure that the system can automatically reset, the program restart start and execution.
2. Software design of ranging system. In the design of the control system software, need to increase the use of single-chip software system, choose C language to write, ranging function single-chip microcomputer is mainly using modular design method, software system by ultrasonic receiving subsystem, circular transmission subsystem, digital filter subroutine and other modules together. Before the main program is used, it is necessary to do the initialization of serial communication and timing counter to ensure the reasonable design of interrupt function. Ultrasonic cycle emission subroutine in the actual application process, the time interval is maintained at 25ms, requiring good ultrasonic transmission and swastika filtering and data storage work, ultrasonic cycle occurs, each time will produce 8 ultrasonic pulses. When calculating the values in the ultrasonic receiving subroutine module, T2 interrupt is needed to read the technical support in the counter and calculate the distance between the probe and the road surface.
Conclusion:
This paper mainly analyzes the application of ultrasonic sensor in automatic leveling control system of pavers, summarizes the principle of leveling control system and the principle of ultrasonic sensor ranging, and puts forward the design method of hardware and software of ranging system. The research shows that the non-contact measurement of pavement elevation deviation conforms to the development trend of automatic leveling control system of pavers, overcomes the shortcomings of traditional contact leveling base in practical use, and plays an important role in improving the performance of the leveling system of pavers. Through the reasonable design of the hardware and software of the rangefinder system, the measuring accuracy of the rangefinder system is improved and the system design requirements are met.
Reference literature
[1] Wang Zhu, Cui Xiaozhi, Hou Chunlei. Analysis and countermeasures of Receiving Signal Intensity Asymmetry of ultrasonic sensor [J]. Journal of Sensors and Actuators, 2015, 0:81 -- 85.
[2] Li Shuying, Yin Jun, Fei Ba, Wei Anhai, Zhou Deqiang. Design of guide system based on ultrasonic sensor array [J]. China Medical Equipment, 2014, 10:28 -- 31