


Study on the maritime calibration method of ultra short baseline on ship
0 Introduction
Ultra short baseline underwater positioning system plays an important role in modern ocean mapping. In the process of installing the ultra short baseline positioning system for underwater acoustic positioning measurement, it is difficult to ensure that the three axes between the center of the transducer and the center of gravity of the mother ship are completely coincident, that is, the existence of system deviation, which is an important cause of the positioning error of the ultra short baseline system, so the ultra short baseline must be calibrated. The ultra short baseline underwater acoustic positioning system is based on the round-trip time of the speed of sound wave propagation in water to measure the distance and measure the phase difference. The ultra short baseline positioning system is generally composed of acoustic measurement equipment and data acquisition and processing equipment. Acoustic measuring equipment is composed of acoustic transducers installed in the hull and acoustic transponder installed underwater, acoustic transducers emit acoustic signals to the transponder, the transponder is connected to the interrogation signal, the response signal transmitter is different from the interrogation signal, the response signal is transmitted through the communication cable to the data acquisition and processing equipment, do further processing and calculation, The spatial position and depth of the transponder relative to the transducer are obtained.
In the ultra-short baseline transducer on board, the transponder is mounted on the target to be located. The transponder measures the horizontal and vertical angles and slant to the transponder. The calibration work of ultra-short baseline is the basis to ensure the accurate positioning of underwater target. Selecting the correct calibration method is very important to improve the positioning accuracy.
l calibration method
The calibration process in this paper is divided into three steps: shallow sea installation deviation calibration, deep-sea positioning accuracy calibration and pull distance test. The shallow sea installation deviation calibration is the basis of the whole calibration test. The deep-sea positioning accuracy calibration and pull distance test are important links to verify the ultra-short baseline index.
1.1 Mother ship noise measurement
The mother ship ran at 0 knots, 2 knots, 3 knots, 4 knots and 6 knots, respectively, and measured the noise value under the corresponding conditions. The noise value was measured 20 times under each condition and recorded every 2 s. The overall noise level of the mother ship is around image.png, which meets the requirement of ultra-short baseline operation. Table 1 shows the noise spectrum levels of mother ship measured at different speeds
1.2 Calibration and calibration test of installation deviation
Installation deviation calibration test was carried out in the water depth of 1000m. In the test, the mother ship first ran a circular track with a radius of about l000m clockwise, then ran a circular track with the same radius counterclockwise, and finally ran two intersecting straight tracks with an intersection Angle of 6O. As shown in Figure 1 and 2. The calibration test results show that the domestic ultra-short baseline data is continuous and stable, the effective rate is 95.4%, and the positioning accuracy is 0.68%.
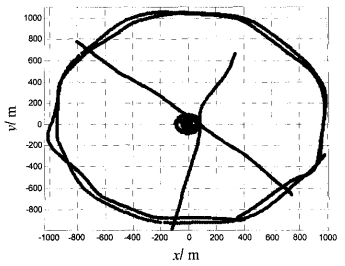
Figure 1. Alignment of track
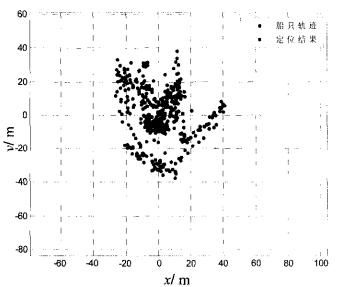
FIG. 2 Scatter diagram of positioning results after calibration

Table 2 Calibration results table
1.3 Calibration test of positioning accuracy
The calibration test of positioning accuracy was carried out in the water depth of 3 000m. The test adopts the mother ship to run a circular track with radius of about 800m and a circular track with radius of 1800m respectively for verification, corresponding to 15.30 respectively. As shown in Figure 3, 4 and 5. The test results show that the positioning accuracy of the ultra-short baseline is about 0.41% slant when the opening Angle is ± 15° at 3000m water depth. When ± 30° opening Angle, the positioning accuracy is 0.62% skew. The positioning performance of a domestic ultra short baseline is stable, and the data efficiency reaches 98.6%.
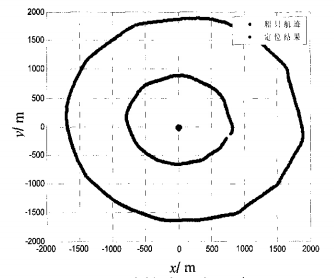
FIG. 3 Test track and location results
I. 4 Distance test
After finishing the positioning accuracy test, the mother ship moved away from the sound beacon at a speed of about 4 knots. Verify the positioning results of the ultra-short baseline to the sound beacon during driving, as shown in Table 3. It can be found that the stability of domestic ultra short baseline positioning is very high. A domestic ultra short baseline has stable positioning and tracking performance in open - Angle model.
Figure 5 Effect of voltage harmonic control
5 Conclusion
A control scheme of three-phase PWM rectifier system is introduced. By using the harmonic suppression characteristic, the good electromagnetic compatibility characteristic of AC side is realized, and the harmonic pollution to the power grid is greatly reduced. A series of electromagnetic compatibility tests have been carried out with a horizontal anchor stranding machine. The results show that all the properties of the device can meet the requirements of ship design. The successful development of this device will provide more options for ship deck mechanical drive forms, and has important engineering practical significance.