


Design of ultrasonic sensor front-end circuit based on FPGA
Wind as one of the most active elements of the meteorological elements, its scope of influence involves military, navigation and aviation, industry, meteorology, scientific experiments and other aspects, so the measurement of wind speed and wind direction is particularly important, among which the ultrasonic sensor is widely used in the measurement of wind direction and wind speed. The front end circuit of ultrasonic probe is an important part of the ultrasonic wind speed and direction sensing system, the experiment shows that the front end circuit directly affects the performance, in addition to the requirements of ultrasonic wave sensor good performance, the matching front end circuit design is also very important. In this paper, a front-end processing circuit of ultrasonic sensor based on FPGA is designed, including a transmitting and receiving circuit and a signal conditioning circuit. The piezoelectric ceramic plate generates mechanical vibration of the same frequency by loading the electric pulse signal of ultrasonic frequency controlled by FPGA, thus forming ultrasonic wave in the air. Instead, after receiving ultrasonic waves in the air, the piezoelectric ceramic transforms the ultrasonic signals into alternating voltage signals. After subsequent circuit processing, input into FPGA for analysis, and finally get wind speed, wind direction information.
1 Ultrasonic sensor transmitting and receiving circuit
FIG. 1 shows the transmitting and receiving circuits of the ultrasonic sensor. The excitation signal of the ultrasonic sensor is generated. In order to prevent the transmitting circuit voltage (+12V) at the back end from burning out the pin, an isolation circuit is added. In addition, consider the drive for the field effector. Adopt MOSFET integrated driver chip. TI Company's TPS28l1D chip is selected. It can both isolate and drive MOSFET tubes, and the output signal always has a fast conversion rate.
When TPS2811D chip outputs high power level, Q2 is switched on, and power supply, Ll and 4 form a channel. At this time, the power supply is L1 and charging. When the output of TPS2811D chip changes from high to low, O2 will be disconnected, while the current in the inductor cannot change, and a self-inducted electromotive force will be generated that prevents the current from decreasing. L1, D4 form a path, thus continuing to charge the capacitor. When the capacitor is full, the current is zero, and the capacitor starts to reverse discharge through L1, D2 and VR1. At this time, both ends of VR1 generate corresponding voltage pulses. The excitation voltage at both ends of sensor Y1 can be adjusted by adjusting the size of VR1 to generate ultrasonic signals of different frequencies. In addition, the field effect tube Q2 is equivalent to a capacitive load, due to the PN junction of the effect of the parasitic capacitance, resulting in a longer turn-off time, so the design of PNP transistor (Q1) composed of rapid discharge circuit, parasitic capacitance through, Q1 fast discharge, to improve the turn-off speed. Series ruler can prevent the effect of parasitic inductance, but at the same time lead to the slow switching speed of Q2. Overall consideration, the resistance value selected is 50n.
Compared with the traditional ultrasonic sensor, most of the high-power field effect tube and transformer are used to generate high-voltage pulse as the excitation signal to drive the sensor, the complexity of the overall circuit design is reduced, the debugging of the circuit is simple, and the stability of the system is improved.
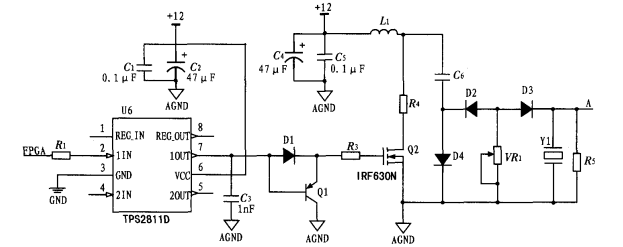
Figure l Transmitting and receiving circuits of ultrasonic sensors
The receiving circuit is relatively simple. At this time, the ultrasonic sensor converts the ultrasonic wave in the air into an alternating voltage signal, and the subsequent circuit processes the voltage signal. Diode D3 is prevented as a receiving circuit when the signal affects the driver circuit.
2 Ultrasonic sensor signal conditioning circuit
2.1 Receive anti-jamming amplitude limiting circuit
The amplitude of noise signals received by ultrasonic sensors is mostly above 1V, which is much larger than that of useful alternating voltage signals. Therefore, amplitude limiting should be carried out before the signals enter the rear circuit. As shown in Figure 2, two inverse-phase parallel silicon diodes are connected between the signal line and the ground wire, and the positive guiding voltage is 0.7V. And the useful alternating signal amplitude we need is much less than O.7V, so part of the noise signal can be filtered out.
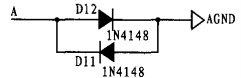
Figure 2 Anti-jamming amplitude limiting circuit
Through the analog signal of the voltage follower into the second stage of amplification, the second stage of amplification using negative voltage feedback reverse phase amplification, amplification factor of 30 times in the design. Choose R as 2kQVR2 as the feedback resistance, and its size can be calculated according to the amplification factor and resistance R, i.e

2.2 Preamplifier circuit
The useful signal received by ultrasonic sensor is very weak, so it is necessary to amplify the alternating signal output by ultrasonic sensor.
Figure 2 shows the schematic diagram of the operational amplifier circuit designed with MAX412 chip. The first-stage amplifier acts as a voltage follower, with which a higher input impedance can be obtained. Reduce the noise, and can play an isolated role between the measured signal source and the data acquisition circuit. In order to present a steady load on the signal source, a resistor is connected in parallel at the input end of the circuit, where the equivalent input resistance of the amplifier is approximately equal to the wind. The addition of capacitor G provides AC coupling and prevents saturation of the amplifier output when the input analog signal contains a high DC component. The capacitance and resistance constitute a high-pass filter, whose high-pass cutoff frequency can be calculated by formula (1) :

In this design, the air is 10kn, C7 is 1F, and the high pass cutoff frequency is 16Hz. For this design, the frequency range of the input analog signal is 200kHz, so it meets the design requirements.
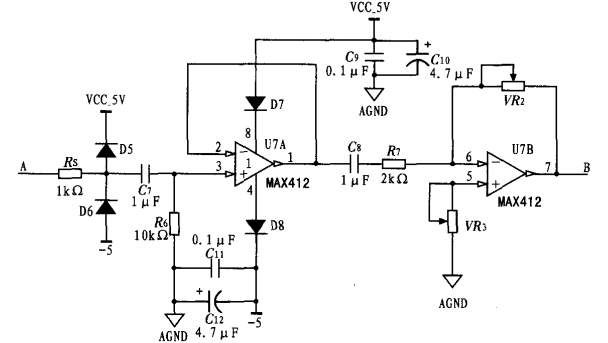
Here, ~R2=60kit, variable resistance VR3 is the equilibrium resistance, and its value can be solved by the following formula:

There are several protections for the operational amplifier in the circuit. The input terminal is connected with two diodes D5, D6 and resistance R to form a two-way limiting circuit for input protection; In order to prevent the polarity of the positive and negative power supply from being reversed, the single wizard performance of diode D7 and D8 is used to protect it. Capacitors C9, C10, C11 and C12 act as decouplers to prevent self-excited oscillation, in which c9 and C1l adopt 0.1F ceramic capacitor, and Cl0 and Cl2 adopt 4.7F tantalum capacitor, which are connected to the ground near the power supply pin.
2.3 Bandpass filtering circuit
The frequency of ultrasonic signal received by the system is 200kHz. Therefore, useless signals of non-200khz frequency should be filtered. This design selects the active filter MAX275 of the United States Letter company. A fourth-order bandpass filter is realized to filter the received signals of the ultrasonic sensor by cascading two second-order filters inside MAX275, as shown in Figure 4.
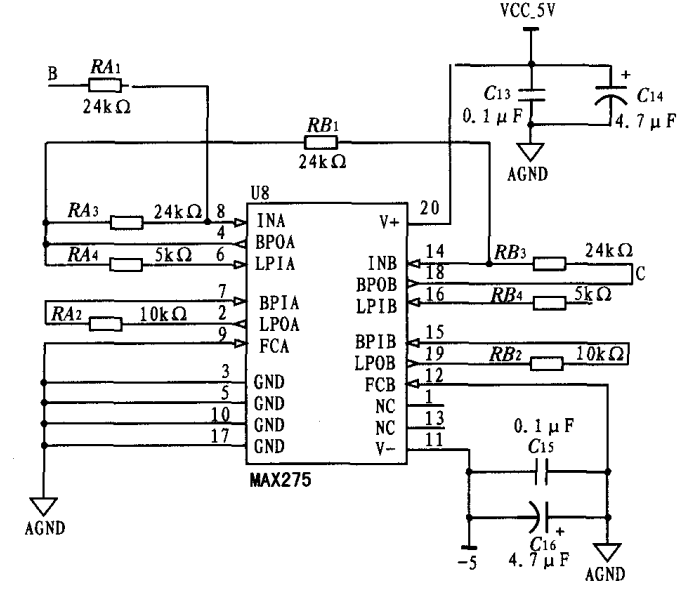
Figure 4 Bandpass filter circuit
Some resistance values can be determined by the designer, while others can be determined by the formula calculation method in the chip data manual. The resulting resistance values are shown in Table 1.
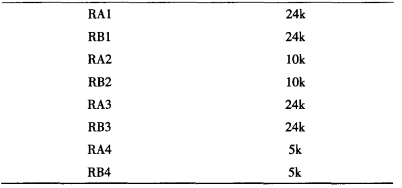
Table 1 Values of each external resistor
2.4 AGC automatic gain control amplifier circuit
In order to ensure that the amplitude of the received ultrasonic alternating voltage signal keeps a relatively stable and reasonable range, the automatic gain control amplifying circuit is used. The AD603 chip of American ANALOG Company is selected, and its gain is set to be 10 ~ 30dB and its bandwidth is 90MHz, which meets the amplification requirements of ultrasonic alternating voltage signal after amplification and filtering by the previous stage. Before using the AD603 chip. Noise reduction processing is required for the signal, and it can play an isolation role. The circuit diagram is shown in Figure 5.
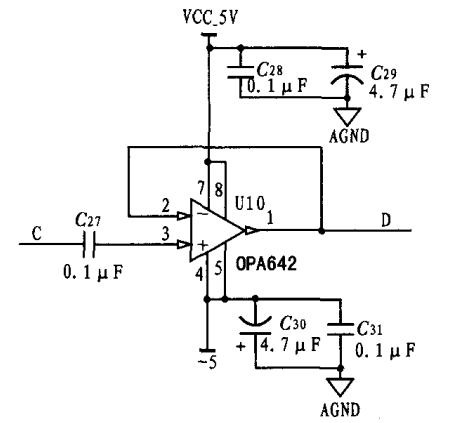
Figure 5. OPA642 voltage follower circuit
FIG. 6 shows the schematic diagram of AD603 automatic gain control amplifier circuit. The principle is that transistor Q4 and resistance VR4 constitute a detector, the function is to detect the circuit output signal amplitude change. When the AD603 output signal amplitude changes, the difference between the two collector currents of transistor Q3 and transistor Q4 will change, so that the current through the capacitor Car will also change. The voltage at both ends of the Car (the automatic gain control voltage VAGC) varies with the amplitude of the output signal of the AD603. When VAGC rises, it causes gain to increase, and when VAGC falls, it causes gain to decrease. It can be seen that the purpose of automatically adjusting amplifier gain is achieved through the automatic change of VAGC. The simulation results show that when VR4 resistance value is 249n, the effect is best. The value of capacitance Car will affect the time constant of AGC, Q1F is taken here.
2.5 Voltage comparison circuit
After the above related processing, ultrasonic electrical signals are still alternating voltage analog signals, which cannot be directly sent to FPGA for processing. In this design, there is no need to convert the entire alternating voltage signal into the corresponding digital signal in FPGA processing, so the analog signal can be loaded into the digital signal by voltage comparison. MAX912 comparator chip is selected, which has two groups of comparators independent of each other, and can be latch-enabled control respectively. In addition, the devices can accept differential input signals and have complementary compatible output loops. Due to the influence of noise, the ideal threshold value of 0V cannot be selected. After several tests, O.2V is selected as the threshold voltage. The circuit of voltage comparator is shown in Figure 7, and the voltage at the output end is small. Can be directly connected to the FPGA.
3 Circuit Simulation
The ultrasonic alternating voltage signal without any processing contains a lot of noise, so it can be used directly without any method, as shown in Figure 8.
After receiving anti-jamming limiting circuit, pre-amplifier circuit, band-pass filtering circuit, AGC automatic gain control amplifier circuit and voltage comparison circuit, the ultrasonic alternating voltage signal is shown in Figure 8. So you can see. After passing through the signal conditioning circuit, the received signal has been converted into a digital signal for direct use by the FPGA.
4 Conclusion
When using ultrasonic sensor to measure wind speed and direction, the front circuit of ultrasonic probe has great influence on the system performance. The front-end circuit designed in this paper has its unique advantages, the overall circuit design complexity is low. The debugging of the circuit is simple and the stability of the system is high. The simulation analysis shows that the transmitting and receiving circuits and signal processing circuits of the ultrasonic front end meet the design requirements and achieve the expected purpose.