


Offshore application and accuracy evaluation of ultrashort baseline positioning
O Introduction
With the development of Marine scientific investigation and resource exploration, the application of underwater survey equipment is more and more extensive and important. In the underwater survey operation, it is necessary to locate the underwater equipment and provide its geographical coordinates. Acoustic positioning is an important and effective positioning method, including long baseline, short baseline and ultra short baseline positioning techniques. Long baseline system consists of many components, more complex layout, high positioning accuracy; Short base line array and ultra short base line array are small in size and convenient in installation, and have wide applications in underwater equipment positioning. The ultra short baseline underwater acoustic positioning system determines the underwater target position by measuring the arrival direction and distance of the signal, and the direction finding task is realized by measuring the phase difference between the signal and the receiving base element, which is the key of the ultra short baseline positioning system. During the underwater operation, the ultra-short baseline system may fail to track the target due to the background noise and the movement of the underwater target, resulting in temporary positioning failure, resulting in discontinuous positioning data and unable to fully reflect the underwater target's motion trajectory. In this paper, the ultra short baseline of Chinese research ship "Xiangyanghong 1O" is taken as an example. On the basis of introducing the underwater acoustic positioning technology of ultra short baseline, the relative position of underwater target is considered. By placing the distribution in space and time to identify and locate the jump point, and using a reasonable data structure and algorithm, to achieve the elimination of the jump point, interpolation of data missing points, to obtain a credible acoustic location data under continuous water, based on this technology, also developed corresponding data processing software. It has been well applied in 4 500 m class A, U and V sea trials in the South China Sea.
Ultra short baseline underwater acoustic positioning technology
It is composed of the onboard part and the underwater transponder. The on-board part includes the electronic control unit and the transducer array. As the control system of the whole system, the electronic control unit is responsible for the operation of the system. The transducer array consists of a transmitting transducer and 4 receiving transducers, transmitting acoustic signals, receiving transducers receive acoustic signals from the underwater transponder, when the underwater transponder receives the transmitting primitive signal, will transmit the response signal, the array of 4 receiving primitives receive the response signal. By calculating the time difference and phase difference of different receiving transducers, the specific location of the underwater transponder is obtained.
The ultra-short baseline array system usually consists of a transmitting transducer in the middle of two groups of hydrophones about 50cm apart, by measuring the time difference and phase difference of the acoustic signal of the underwater transponder to reach the hydrophone and the slant distance between the target and the receiving array. Its positioning principle schematic
The ultra-short baseline system calculates the slant distance r of the target by measuring the acoustic wave propagation time from the underwater transponder to the transducer array, and calculates the pitch Angle and azimuth Angle of the target by measuring the acoustic wave phase difference from the target to each hydrophone array, so as to determine the relative position of the target relative to the array.
2. Calibration and accuracy evaluation of ultra-short baseline positioning system
In this paper, the ultra short baseline positioning system installed on the ship "Xiangyanghong 10" was calibrated and analyzed, and the outliers of the collected original data were removed and smoothed, so as to evaluate its positioning accuracy. Finally, the position information and depth information are fused and converted into geodetic coordinates to generate high-precision three-dimensional positioning data of the target.
2. 1. Calibration and accuracy evaluation methods
After the ultra-short baseline positioning system is installed on the ship, because the three-dimensional coordinate system of the ultra-short baseline transducer array installed on the bottom of the ship is inconsistent with the three-dimensional coordinate system of the ship, there is some deviation. Therefore, the deviation Angle of the matrix coordinate system relative to the coordinate system of the ship in the X, y and z directions should be calculated through the calibration of the matrix. Ensure the reliability of ultra-short baseline positioning and improve its positioning accuracy.
It is commonly believed that the deviation Angle of X axis of the array relative to the hull is the bow deviation Angle, the deviation Angle of y axis relative to the hull of the array is the pitch deviation Angle, and the deviation Angle of z axis relative to the hull of the array is the roll deviation Angle.
Before the calibration of the ultra-short baseline array, CTD sonic profile is measured in the test sea area to provide sonic profile data for the ultra-short baseline positioning system. The calibration site of the ultra-short baseline array is selected in a relatively flat area with a water depth of about 1500 1TI. At the beginning of calibration, the ultra-short baseline acoustic transponder placed at the bottom of the sea is used as the calibration transponder to ensure that the accuracy of the heading deviation Angle in the compass signal is 0.1. The accuracy of inside pitch deviation Angle and roll deviation Angle is 0.01. Within. Then, the ultra-short baseline array is placed 2m below the bottom of the ship by means of lifting rods. After normal system debugging, in order to ensure the safety and stability of the acoustic array of the bottom of the working mother ship, the working mother ship moves above the transponder at a speed of 2 ~ 3 kn in accordance with the "8" track for 2 cycles. The data of the first period is used to calculate the deviation matrix of the ship's bottom acoustic array relative to the hull coordinate system, and the data of the second period is used to calculate the deviation of each included Angle of the ship's bottom acoustic array coordinate system relative to the hull coordinate system in the three axis directions.
2. Calibration and accuracy evaluation data analysis
In July 2015, the calibration and accuracy evaluation test of the ultra-short baseline array was carried out in the South China Sea. Under good sea conditions, two sets of "8" data were obtained, which were classified as A and B. The distribution of the location data of the transponder was shown in Figure 3 and Figure 4. As can be seen from the figure, the data of the first calibration are relatively dispersed, mainly distributed in the rectangular range of 200 m × 200 m. The data of the second calibration were concentrated and mainly distributed in the rectangular range of 2Om X2Om. The data analysis is shown in Table 1. The effective data ratio of both groups is over 80, and the data quality is good.
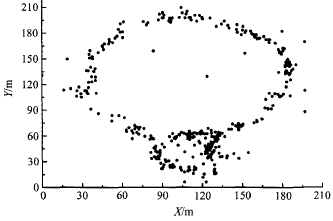
Figure 3. Location data distribution of the first acoustic transponder calibration
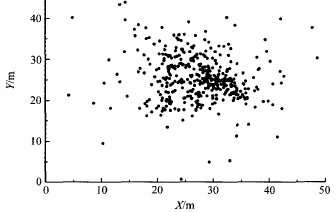
Figure 4. Location data distribution of the second transponder calibration
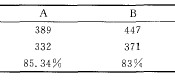
Table 1 Calibration data analysis table of array
2.3 Offshore application of ultra-short baseline positioning system data processing software
In order to facilitate the rapid processing of ultra-short baseline data by scientific research team members at sea, an ultra-short baseline data post-processing software is developed based on the program M atlab. The software firstly eliminates the location jump point data of the acoustic transponder, and then smoothen the eliminated data, and can save the processed data and map it. Figure 5 is the original data of target location, and Figure 6 is the data processed by the software.
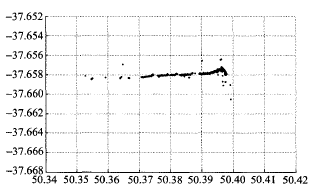
Figure 5 Raw location data from the acoustic transponder
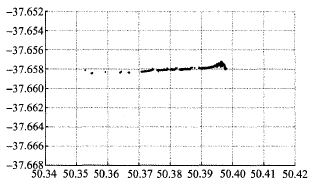
Figure 6 Data after software processing
As can be seen from the comparison between FIG. 5 and FIG. 6, the data after software processing has significantly reduced jump points, and the data curve is much smoother, which improves the processing efficiency of ultra-short baseline positioning data.
3 nodules
The ultra-short baseline positioning system can easily and quickly locate underwater targets. The offshore calibration test of the ultra-short baseline array verifies that the measuring accuracy of the array can meet the underwater positioning requirements of offshore equipment, and the data post-processing software of the ultra-short baseline can also realize the rapid data processing. Due to the influence of sea conditions, ship noise, GPS signal, compass signal, etc., the difference between the two calibration times is large. In addition, the pitch deviation Angle may be large due to the array installation position, which requires attention in the array maintenance later. At present, data post-processing software can only carry out simple processing, but can not do further difference processing, error analysis and accuracy evaluation, which needs further improvement.