


Research on high precision pressure sensor for satellite
0 Introduction
The function of the pressure sensor used in satellite is to provide the pressure value of propellant tank and gas cylinder to the satellite telemetry system, which is used to calculate the remaining propellant dose, predict the life of the satellite in orbit, monitor the status of the system, and assist the system in fault judgment and positioning. With the improvement of fault diagnosis and condition monitoring system technology of spacecraft propulsion system, the accuracy of pressure sensor is becoming higher and higher, especially during the life of satellite, it is very important to accurately estimate the residual propellant amount, and it is urgent to develop high-precision pressure sensor.
Silicon piezoresistive pressure sensor has good medium compatibility and long-term stability, high sensitivity, fast dynamic response and high measurement accuracy, and is widely used in space vehicles. Its chip is a semiconductor product, and the output is susceptible to the cross-sensitivity of pressure and temperature, which seriously affects the linearity of the sensor. Therefore, to develop a high-precision pressure sensor, the output characteristics of the sensor must be compensated and corrected [1]. Based on the analysis and comparison of various error correction techniques, this paper selects a surface fitting method to embed a high-precision temperature sensor inside the sensor, so that the sensor has the function of integrated measurement and calibration of pressure and temperature. The least square method is used to complete the calibration compensation of the pressure sensor, and the accuracy of the pressure sensor is improved to 0.0418%.
1 Error correction technology
The error correction technology of pressure sensor has two kinds: traditional error correction technology and digital compensation technology. The traditional method is to calibrate and compensate the sensor output signal by analog method. The difficulty is relatively large, the compensation accuracy is not high, and is limited by the nonlinear error of the compensation element, which is affected by temperature drift and cannot be compensated point by point, so the accuracy is not high and the circuit is complicated [2]. Modern signal conditioning technology is the use of digital adjustment analog system, the more commonly used discrete compensation algorithm and data fusion technology. The discrete compensation algorithm is characterized by relatively simple testing and calibration, but its contribution to the accuracy index is limited [3].
Data fusion is a multi-data comprehensive processing technology, the biggest advantage is that it can fully integrate useful data and improve the accuracy of target parameter measurement [4]. The data fusion technology mainly includes surface fitting method, binary interpolation method and neural network algorithm. The advantage of binary interpolation is fast speed and high precision, but the disadvantage is that the control data table needs to be input in EPROM in advance, which is not only a large workload, but also prone to error. The data fitted by neural network method has high accuracy, which is one of the hot spots in the current research. However, the neural network algorithm requires a large amount of data and complicated programming, which makes it difficult for general microcontrollers to be qualified, and has disadvantages such as unstable network and long training cycle.
The surface fitting method is a mature compensation method with high accuracy of data fitting. For example, the zero point temperature drift and sensitivity temperature drift of the piezoresistive pressure sensor compensated by the surface fitting method by Kulite Company of the United States are 3×10-4℃; A high-precision barometric altimeter developed by Nanjing University of Aeronautics and Astronautics, suitable for small flying robots and unmanned aerial vehicles, improves the actual output accuracy of the pressure sensor to 0.01% by piecewise surface fitting [5]. By setting up the test system and data analysis platform, the surface fitting method is used to compensate the output data of piezoresistive pressure sensor for analyzing, testing and evaluating the pressure sensor used in satellite.
2 Hardware Components
The composition principle of pressure sensor. Constant voltage source is used for power supply, and the power supply is regulated twice through the DC voltage regulator circuit to supply the pressure sensitive core. The output signal of the Wheatstone bridge composed of pressure sensitive core and resistor is amplified and adjusted by the pressure signal amplifier circuit. The temperature measuring element is taken as one of the bridge arms, and the resistance value of the other three bridge arms is the same. When the ambient temperature changes, the differential pressure output signal of the bridge changes, and the changed signal is amplified by the instrument amplifier.
According to the working environment of the product on the satellite, the temperature field distribution inside the product was analyzed. PT1000 resistor was selected as the temperature measuring element, and the platinum resistor was installed on the oil-filled base to ensure that the detected temperature was consistent with the actual temperature of the pressure-sensitive core, as shown in Figure 2.
3 Software Compensation
The pressure measured by the sensor is a binary function of the output voltage U of the pressure sensor and the output signal voltage Ut of the temperature sensor, so it can be described by a two-dimensional regression equation. That is, p = f (U, Ut). Through the two-dimensional calibration test of the sensor, the constant coefficients of the equation are determined by the least square method according to the calibrated input and output values, and the quadratic surface fitting equation is obtained. The compensation method adopted is to use the pressure and temperature data collected during calibration to fit the binary function U = g (p, T) of the actual output voltage of the pressure sensor and the pressure and temperature it feels. The function is expanded according to the Taylor series. Generally speaking, the fitting accuracy of the expansion to the quadratic power can fully meet the requirements of 0.05% :

Where, Kij is the fitting coefficient; P is the pressure calibration value; T is the temperature measurement.
4 Test Data
The high precision pressure sensor calibration platform is used to calibrate and test the pressure sensor in the range of 0 ~ 0.1MPa. The temperature standard point is -5, 0,5, 15, 20, 25, 30, 40, 50 ℃, and the pressure standard point is 0, 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 110 kPa. After the temperature and pressure stabilized in the calibration, the pressure and temperature output voltage of the sensor under the rated operating voltage were collected successively.
4.1 Traditional least square method
Firstly, according to QJ28A-98 "Pressure Sensor Static Uncertainty Calculation Method", the fitting linear equation is calculated as follows: U = 0.220723 + 4.654 831p, the sensor was verified according to the linear equation, and the resulting errors were shown in Table 1, where the maximum error was 0.514 1 kPa and the relative error was 0.514 1%.
4.2 Overall surface fitting method
The host computer was used to fit the whole surface of the data in the whole temperature zone, and the verification error results were shown in Table 2. As can be seen from Table 2, after fitting the global surface equation, the maximum absolute error of pressure measurement in the whole temperature zone of the sensor is 0.111 1 kPa, and the relative error is 0.11%.
4.3 Pieced surface fitting method
The original calibration data were divided into different temperature zones, which were segmented for surface fitting. The relative error of the standard point is calculated according to each fitting equation, and the fitting equation corresponding to the minimum relative error is found. After several fitting calculations to determine the fragmentation mode, the whole temperature is divided into three slices according to temperature: [-5 ~ 15 ℃], [20 ~ 30 ℃], [40 ~ 50 ℃]. The fitting error is shown in Table 3. As can be seen from Table 3, after fragment fitting, the maximum absolute error of pressure measurement in the whole temperature zone of the sensor is 0.041 8 kPa, and the relative error is 0.041 8%, which is much smaller than the overall surface fitting error of 0.11% and the linear fitting error of 0.514 1%, and the pressure measurement accuracy has been significantly improved.
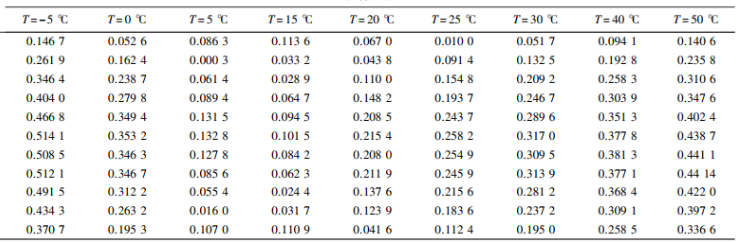
Table 1 Traditional linear fitting errors
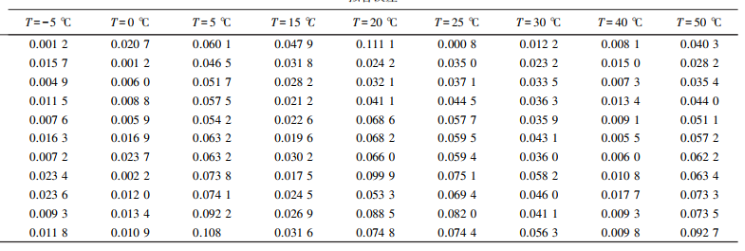
Table 2 Overall fitting verification error
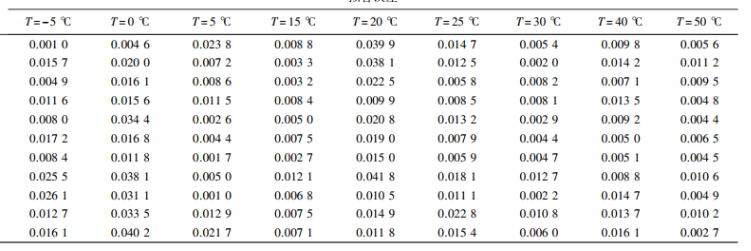
Table 3 shard fitting errors
5 Conclusions
In this paper, surface fitting is used to fuse the output data of pressure sensor in order to improve the measurement accuracy of pressure sensor effectively. The experiment shows that the surface fitting calibration method can solve the data fusion problem of pressure sensor well, and the output accuracy of pressure sensor can be improved to 0.048%.