


Research on inclination drift and natural frequency of HRTM high resolution electronic inclination sensor
Precision tilt sensors are widely used in seismic crustal deformation monitoring, geological engineering mapping, balance control of robots and electronic equipment, level control of agricultural machinery and various level measurement fields [1]. With the development of automation and electronic measurement technology, electronic tilt sensors have replaced simple bubble tilt sensors in the past. High Resolution Electronic Tilt Sensor HRTM is a precision electronic tilt sensor widely used in the fields of geophysics and geodesy. Both the TZK2-D, developed by the University of Hannover in Germany, and the DIADEM digital Zenith instrument, developed by the University of Zurich in Switzerland, take advantage of the high resolution and miniaturized structure of HRTM. The former integrates two HRTM instruments to measure the residual deviation between the vertical axis and the physical vertical direction after the instrument is leveled, and generate a reference to the Earth's gravitational field. In addition, the National Timing Center of the Chinese Academy of Sciences and the Beijing Astronomical Observatory also use HRTM to measure inclination and its short-term variation.
In the application process of electronic tilt sensors, some scholars have noticed the existence of drift and natural frequency phenomena [2-8], but these studies are all focused on tilt sensors based on liquid pendulum, and there is a lack of relevant studies on HRTM tilt sensors based on solid pendulum. In this paper, the experimental environment is designed, several groups of 10 h HRTM data are collected, and the verification and analysis experiments on HRTM inclination drift and natural frequency jump are carried out. On the one hand, by studying the structure of the sensor, the causes of natural frequency hopping are analyzed. On the other hand, by using the control of the high-precision turntable, the natural frequency data of HRTM is recorded and extracted, the inclination drift phenomenon and the existence of natural frequency jump of HRTM are verified, and the analysis results are given to provide a basis for the further development and use of the inclination sensor and data processing.
1 Inclination sensor design
1.1 Overall Structure
HRTM uses capacitive displacement sensor and physical pendulum as the detection unit, can sensitively detect the inclination change, with low noise, high precision, high sensitivity, compact structure, etc., but the measurement range of the system is narrow, usually can only cover ±2 ± 0.3 MRAD. Figure 1 shows the structure diagram of HRTM. It can be seen that HRTM is a three-plate capacitor, and the pendulum is located between the three capacitor plates. The circuit of the lock amplifier operates at a frequency of around 30 kHz and a gain of 15. The advantage of the lock amplifier is that it can selectively amplify the useful signal, so as to approach the physical limit of Brownian motion of the pendulum, with the result that even the smallest change in the inclination of the useful signal in the sensor can be displayed. As an output signal, the tilt sensor HRTM provides an analog voltage of approximately ±6 V, which is a measurement of the pendulum position between the capacitor plates and a measure of the tilt of the sensor. The sensor is powered by the recorder and operates at ±12 V. The reason of HRTM inclination drift is analyzed. The main reason is that the temperature drift of the components used in the measurement circuit of the inclination sensor is caused by the current thermal effect of the electronic components, which leads to the signal drift. Secondly, the capacitance of capacitive inclination sensor also has capacitance drift theoretically [9].
1.2 Sensing Elements
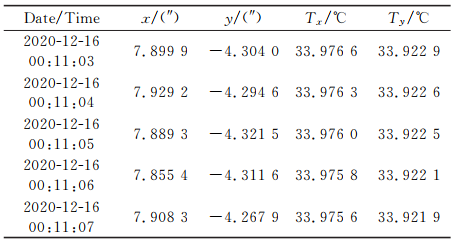
The inclination sensor HRTM has a compact metal housing in which an aluminum pendulum acts as a gravity sensing element and is connected by two beryllium copper plate springs 50μm thick and 3 mm wide. The electronic components required for operation are mounted on a circuit board on the side of the sensor for added compactness. Two plastic screws can lock the pendulum for transport and also mechanically limit the sensor's maximum measuring range [10]. The external dimensions of the HRTM are 80 mm×60 mm×130 mm, the resolution is better than 1 nrad, the measurement range is -10 ~40 ° C, the integrated 24-bit ADC and data logger can use RS232 or RS485 interface to transmit data, and the HRTM can be used to transmit data. The data is output in ASCII format, and the data update rate can be changed through serial port commands. This type of inclination sensor can also be used to measure temperature, pressure, humidity, etc. (Table 1).
1.3 Principle of solid tilt sensor
A solid pendulum is composed of a pendulum, a cycloid and a support. The pendulum is subject to the action of gravity G and tension T, and its combined external force F is:
Where,θ is the Angle between the cycloid and the vertical direction.
When the object does free vibration, the displacement will change with time according to the law of sine or cosine, the frequency of vibration has nothing to do with the initial conditions, only related to the inherent characteristics of the system (such as mass, shape, material, etc.), called the natural frequency, also known as the natural frequency, and its corresponding period is called the natural period. Research on natural frequency is conducive to ensuring the stability of products [11]. Because the inclination sensor is a solid pendulum sensor, it contains its own natural frequency in the measured data.
2. Experiment and analysis
The experiments of inclination drift and natural frequency extraction were carried out by HRTM. The inclination drift of the inclination sensor comes from the temperature drift of the current thermal effect of various electronic devices inside the instrument, so the inclination sensor is very sensitive to temperature. In order to find out the range, degree, rule and reason of the influence of temperature on the inclination sensor, it is necessary to ensure a long enough experiment time for verification. For the extraction of natural frequency, Ye Shangying et al. [5] put forward two experimental methods: The first method is to collect appropriate natural frequency data and extract natural frequency through spectrum analysis; The second method is to carry out the excitation experiment on the inclination sensor. The sensor is placed on the swing table, and the inclination sensor is excited by the changing frequency.
Due to the short measuring range of HRTM, in order to effectively collect the tilting Angle drift image and fixed frequency of HRTM, the HRTM was installed on a high-precision turntable, and sufficient amount of tilt data was collected through the swinging stimulation of the turntable and different poses for experimental analysis.
3. knots
In this paper, the spectral analysis method suitable for HRTM is used to collect and analyze the long-term data of HRTM, a high-resolution electronic inclination sensor. The results show that:
1) HRTM has a relatively obvious drift phenomenon, the temperature of its x and y axes changes by 1.5 ℃ during the whole process, and the corresponding inclination changes are 4.5 "and 10".
2) The inclination data of HRTM output has natural frequency hopping, and the natural frequencies of x axis and y axis are 2.773 Hz and 2.813 Hz respectively.
3) The inclination of the two axes of the HRTM is linearly related to the height of the internal temperature of the instrument.
Since the inclination data output by the inclination sensor is affected not only by temperature, but also by many other factors (such as air pressure and humidity), the interference of other factors on the inclination data can be studied in the future, so as to further study the performance of the high-resolution electronic inclination sensor HRTM.
reference
[1] Zhang Weisheng. The Theory and Developmentof Tilt Sensor[J]. The World of Tilt Sensors,2002,8(8) :18-21 (Zhang Weisheng. The theory and development of Tilt sensor [J]. Sensor World, 2002, 8(8) : 18-21)
[2] Di Liang, Lu Deming, Ding Jianguo, et al. Analysis of interference characteristics of meteorological factors on tiltmeter observation [J]. Geodesy and Geodynamics,2017,37 (8) :870-875(Di Liang, Lu Deming, Ding Jianguo, China). et al. Analysis of Meteorological Factorson TiltmeterInterference Characteristics[J] . Journal of Geodesy and Geodynamics, 2017, 37 (8) : 870-875)
[3] Wang Deli, Wei Jiandong, Wang Chong, et al. Accuracy analysis and Test of electronic level [J]. Engineering of Surveying and Mapping,2018,27 (1) :68-72 (Wang Deli, Wei Jiandong, Wang Chong, China) et al. Analysis and Testing of Electronic HorizontalInstrument[J] . Engineering of Surve
[4] Zhang Qibeng, Li Xingfei, Tan Wenbin, et al. Modeling and calibration of attitude Angle measurement for axial tilt sensor [J]. Mechanical Science and Technology,2016,35 (7) : 1,066-1,101 (Zhang Qipeng, Li Xingfei, Tan Wenbin, et al.,2016) et al. Modelingand Calibration of Dual-Axis Tilt Sensorfor Measuring Attitude Angles[J] . Mechanical Science and Technology forAerospace Engineering, 2016 , 35(7) : 1 096-1 101)
[5] Ye Shangying, Wang Suibing, CAI Huaxuan. Effect of Temperature on Level indicator [J]. Shanghai Machinery,1964,2(5) :23-26 (Ye Shangying, Wang Suibing, CaiHuaxuan. The Effectof Temperature onthe Valueofthe LevelMeter[J] . Shanghai Machinery, 1964, 2(5) : 23-26)