


The utility model relates to a security system based on joint defense and control of ultrasonic wave and infrared ray
With the rapid development of science and technology today, people's pursuit of quality of life continues to improve. In recent years, the emergence of various high-tech products has brought people a lot of convenience. Although smart home is not an emerging technology, but due to the domestic industry standards are not unified, expensive, poor after-sales and many other factors [1], so that people are discouraged, the actual utilization rate of smart security is not high. The combined control technology of ultrasonic wave and infrared ray proposed in this paper is easy to operate, easy to use, reliable and low in price, which is conducive to wide application.
1 Overall system design
The overall design structure of the system is shown in Figure, which can be divided into single-chip microcomputer main control module, sensing module and output driver module.
The sensor module is divided into ultrasonic sensor and infrared sensor. The single chip microcomputer is the main control chip, which sends signals to the ultrasonic transmitter through the program. When receiving signals from the ultrasonic and infrared sensors, it drives the output action. The sound and light alarm adopts the on-site alarm mode, and the remote wireless alarm is sent by the single chip microcomputer to the communication module, which is then connected to the security office for remote rescue.
2 Hardware Design
The single-chip microcomputer is used as the main control module in the system, which has the advantages of low voltage, high performance, and is equipped with independent reset button, easy to use and flexible. The ranging signal of the ultrasonic sensor and the positioning signal of the infrared sensor are respectively input through the I/O port, and the audible and visual alarm, LED display and wireless alarm are driven according to the software algorithm. This design distinguishes the distance and orientation of obstacles by setting the different color of light flashing and alarm sound.
2.1 MCU minimum system
The minimum system of single-chip microcomputer is shown in Figure 2: including single-chip microcomputer, crystal oscillator circuit and reset circuit. The reset circuit is connected to the 10μF electrolytic capacitor C3 with a key switch S1 in parallel. When the switch is pressed, the capacitor discharge RST is pulled to a high level. When the capacitor is charged, the high level is maintained ꎬ to complete the reset of the MCU. The internal clock of the MCU is provided by the crystal oscillator circuit. In this design, 12 kHz resonant capacitor C1 and 30pF porcelain capacitor are selected for clock signal frequency to filter out the high-frequency signals in the crystal oscillator part, so that the crystal oscillator works more stable [2].
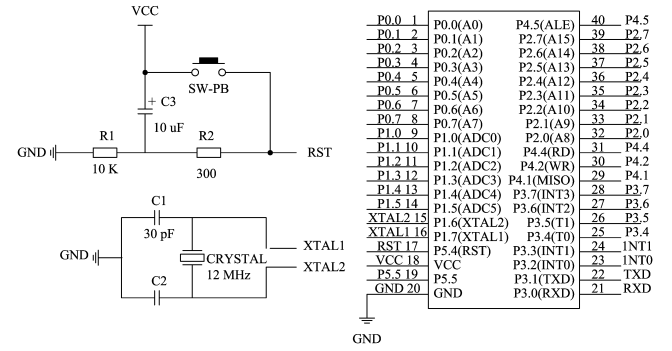
FIG. 2 MCU minimum system
2.2 Ultrasonic Sensor
The principle of ultrasonic distance measurement technology is simple and the distance measurement is convenient, but due to the serious divergence of ultrasonic waves, the error is large in the long-distance measurement, so it is not suitable for positioning. This design uses HC-SR04 ultrasonic module, which has stable performance and accurate ranging, and can be used for ranging within 300cm.
The working principle of ultrasonic sensor is shown in Figure : The microcontroller control circuit sends out a pulse of 40 kHz frequency (while starting the counting circuit to start the timing) and acts on the probe of the ultrasonic sending end. The inverse piezoelectric effect will occur on the probe, resulting in resonance and forming a mechanical vibration wave, which is the ultrasonic wave that needs to be sent. When the ultrasonic wave meets an obstacle, it is reflected back and received by the probe of the ultrasonic receiving end. Then it is converted into electrical signal by piezoelectric effect, and the receiving circuit amplifies, detects and reshaps the signal to the microcontroller. At this time, the timer stops timing. According to the formula L = 1/2vt, the sound speed of the measured distance L.v is 340m/s, and t is the time from the first transmitting pulse to receiving the echo.
2.3 Infrared Sensor
When someone passes, the human body emits infrared with a wavelength of about 10 μm, the sensor needs to accurately detect this infrared, while excluding the infrared interference of other wavelength segments, it is necessary to install a filter in its front end, only allowing light of about 10 μm wavelength to pass, other band signals are filtered out. After detecting the infrared ray of the human body, the pyroelectric effect will occur on the two pyroelectric elements, because the polarization direction of the pyroelectric element is opposite, when receiving different heat, different amounts of charge will be generated, resulting in the formation of pyroelectric current. This current passes through a preamplifier composed of a source follower of a field effect tube with high internal resistance. Through impedance conversion, the weak current signal of the thermal-electric probe element is converted into a useful voltage signal output. In order to prevent damage to the field effect tube, a gate resistor with high resistance value is connected in parallel between the gate electrode and the probe element. Finally, the voltage signal is input to the MCU for processing. When the external environment changes, the two pyroelectric elements will produce an equal amount of charge, which can cancel each other, and there is no electrical signal output.
3 System workflow
The working flow chart of the system is shown in the figure. Before using the sensor module, reset the parameters of the sensor module, and then the system enters the layout control state. When someone enters the security area, the infrared sensor will detect the information passed into the microcontroller, the microcontroller sends a pulse signal to the ultrasonic transmitter probe, the timing begins, the timing stops after receiving the ultrasonic wave reflected back by the obstacle, the microcontroller passes a delay, data processing, and drives the output.
4 Test
In order to verify the accuracy and precision of the system and compare it with a single infrared sensor system, experiments in the experimental group and the control group were set up and carried out in five groups [5]. The test is carried out in an open area indoors. The preset alarm interval of the system is 50 ~ 3 000 mm, and the test time is from 8:00 to 18:00 every day. The actual distance between the intruder and the alarm is measured by a tape measure.
By comparison with the test results ꎬ, the number of measurement errors and missed positives of the experimental group was significantly smaller than that of the control group, and the number of false positives was slightly higher than that of the control group. The reason is that the designed system does not take too much into account the influence of interference sources similar to the human body, so there are false positives, and the false positives should be further reduced with image sensing in the later stage.
5 Conclusion
This system combines the advantages of ultrasonic and infrared sensors in close detection, coupled with the characteristics of single-chip controller, the design of this security control system improves the traditional intelligent security system system, the shortcomings of large, practical is not strong, fundamentally solve the problem of people's choice of security products, to meet people's needs for simple fashion intelligent security.
reference
[1] Liu Jialu. Discussion on Problems and solutions in the development of smart home [J]. Shanxi Architecture, 2016,42 (4):257-258. (in Chinese)
[2] Yang Chenghui, Wang Shuzhi, He Youxin, et al. Design of Intelligent Curtain Control System based on STC89C52 [J]. Automation Instrument, 2016,37 (6):246-2481.
[3] Xu Feng, Zhang Qi. Design and research of infrared Automatic Door control System based on single-chip computer [J]. Journal of Sichuan Vocational and Technical College, 2020(2):163-168.
[4] Luo Qing-Sheng, Han Bao-ling. A ranging and positioning System based on Ultrasonic and infrared detection technology [J]. Computer Measurement and Control, 2005(4):304-306.
[5] LU Tao, Xing Junhui, Wang Wei. Design of Intrusion monitoring system based on Multi-sensor Fusion [J]. Microcontroller and Embedded System Application, 2020(3):38-41.